
Page 201 - 信息的脉络
P. 201
·第三部分·
操纵界面(如飞机的操纵面或汽车的方向盘、踏板等),完成实际的驾驶工作。
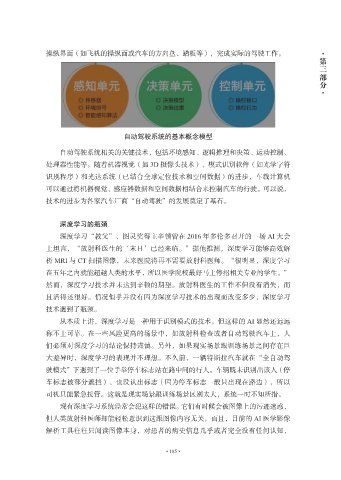
自动驾驶系统的基本概念模型
自动驾驶系统相关的关键技术,包括环境感知、逻辑推理和决策、运动控制、
处理器性能等。随着机器视觉(如 3D 摄像头技术)、模式识别软件(如光学字符
识别程序)和光达系统(已结合全球定位技术和空间数据)的进步,车载计算机
可以通过将机器视觉、感应器数据和空间数据相结合来控制汽车的行驶。可以说,
技术的进步为各家汽车厂商“自动驾驶”的发展奠定了基石。
深度学习的瓶颈
深度学习“教父”、图灵奖得主辛顿曾在 2016 年多伦多召开的一场 AI 大会
上坦言,“放射科医生的‘末日’已经来临。”据他推测,深度学习能够高效解
析 MRI 与 CT 扫描图像,未来医院将再不需要放射科医师。“很明显,深度学习
在五年之内就能超越人类的水平,所以医学院校最好马上停招相关专业的学生。”
然而,深度学习技术并未达到辛顿的期望。放射科医生的工作不但没有消失,而
且活得还很好。情况似乎并没有因为深度学习技术的出现而改变多少,深度学习
技术遇到了瓶颈。
从本质上讲,深度学习是一种用于识别模式的技术。但这样的 AI 显然还远远
称不上可靠。在一些风险更高的场景中,如放射科检查或者自动驾驶汽车上,人
们必须对深度学习的结论保持谨慎。另外,如果现实场景跟训练场景之间存在巨
大差异时,深度学习的表现并不理想。不久前,一辆特斯拉汽车就在“全自动驾
驶模式”下遇到了一位手举停车标志站在路中间的行人。车辆既未识别出该人(停
车标志被部分遮挡)、也没认出标志(因为停车标志一般只出现在路边),所以
司机只能紧急接管。这就是现实场景跟训练场景区别太大,系统一时不知所措。
现有深度学习系统经常会犯这样的错误。它们有时候会被图像上的污迹迷惑,
但人类放射科医师却能轻松意识到这跟图像内容无关。而且,目前的 AI 医学影像
解析工具往往只阅读图像本身,对患者的病史信息几乎或者完全没有任何认知,
• 185 •